摘要:RAPIRO - Raspberry Pi機器小女僕(1)組裝篇
記得去年2013,快年底時kickStart集資網站上出了一隻可愛的小機器人
https://www.kickstarter.com/projects/shota/rapiro-the-humanoid-robot-kit-for-your-raspberry-p
相關介紹文章:
讓人一見鍾情的RAPIRO - Raspberry Pi 機器小女僕
https://www.kickstarter.com/projects/shota/rapiro-the-humanoid-robot-kit-for-your-raspberry-p
RAPIRO: The Humanoid Robot Kit for your Raspberry Pi
官方網站
http://www.rapiro.com/
這隻叫Rapiro的可愛小鋼彈,引起了一陣大的騷動,
因為他可以結合Raspberry pi(一個像信用卡大小的小電腦版linux系統)
去做很多有趣的事情~XD
Raspberry pi 介紹
http://zh.wikipedia.org/wiki/%E6%A0%91%E8%8E%93%E6%B4%BE
Raspberry pi 記錄1-安裝Raspberry pi
http://goo.gl/xhP1sD
Raspberry pi 記錄2-設定wifi、藍芽
http://goo.gl/uitpd
透過網路上的demo影片可以發現
https://www.youtube.com/watch?v=AQynsVZx5Pk
Rapiro可以捉東西、推東西、走路、重點是它超可愛的很療癒XD~~
終於在今年2014年它發行了,但殘念的是除了先前贊助kickStart集資的人
台灣還買不到orz
由於安迪兒的朋友剛好今年3月去日本的秋葉原玩,他有去找了一陣,說是全秋葉原只有2隻
於是朋友就帶了一隻回台灣給安迪兒玩玩了
真是太開心了吶~XD
(剛查了一下目前有開放可以訂購~官網有Amazon的連結)
因為安迪兒拿到的初期,還沒啥資料,官網只有組裝照片
安迪兒就超可憐的半夜一張張照片在放大和比對怎麼組裝
整隻Rapiro拆了不下5次以上~
裝的過程有很多想像不到的事,像是馬達震動過大,轉動角度不太正確,程式測試沒反應,裝好完全沒動作...等等
還有電池明明裝滿了,機器人就是很怪,一直抖動,程式不動,不會校正馬達,
最後在回應的聊天裡看到, 猜測可能是電量不夠,換了一個12V 2A的變壓器終於就搞定了
http://goo.gl/lUeLDs
這時安迪兒內心超極OS(明明裝滿電池電就不夠,附那個電池盒有點...之類的)
總之~~經過一陣子的天災人禍(~XD是這樣的說嗎?)
這隻可愛的小鋼彈終於動了~~看到它動作正確的那一瞬間~都快哭了~XD
目前算算玩Rapiro也有1個多月了,安迪兒把一些心得貼上來和大家分享一下
先和大家介紹一下外觀&組裝
清點一下零件(其實~~~有少也是沒辦法,只能寫信去日本去要了~XD)
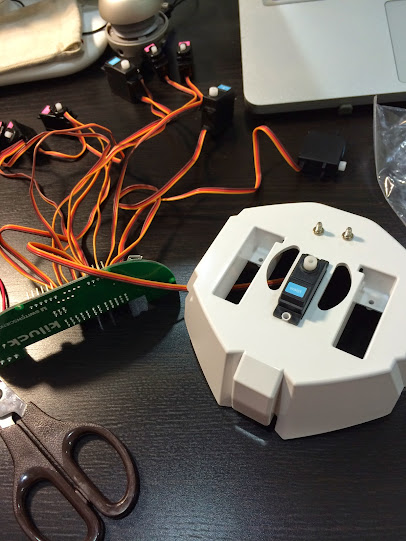
開箱照:





安裝時大約注意一下一些地方
1.先把所有的馬達接上arduino那塊版子,然後通電看看每一個是不是都會轉動
要放一下觀察一下,摸看看每個馬達看有沒有問題,安迪兒有顆馬達會異常的熱
但沒特別注意,之後竟然在測試時(約玩了半小時)就冒煙了,事後證明那個馬達有問題
所以要先測一下每個馬達的裝況

2.馬達輪軸的轉動(雖然不需要定位很準,但不能差太多)
嗯~簡單來說裝好手腳頭等等部位要轉轉看順不順,有時會裝錯邊變成手不能往後,或是頭只能到某個角度
3.電源問題,安迪兒事後證明,若電源不足,雖然程式能寫入,眼睛燈也會亮
但會有抖動、或是行走很緩慢沒啥力的樣子...等等
總之約用12V 2A以上(安迪兒是用12V 3A,作者很像是用到4A),就都很順了
看他們日本回的討論,也有一些電量比較強的電池,但台灣應該買不太到
4.其它的大約就是小心的一層一層的裝,看著照片其實也裝的起來(馬達線很軟,別太用力凹)











裝好後:
重點來了,雖然完美的裝好了,但也要能動吶~~這才是機器人~XD
參考官網上的download頁面
http://goo.gl/uOAdpH
先做2件事
1.install driver
Installing Drivers for Rapiro Board
http://www.rapiro.com/install_rapiro_driver/
2.download Arduino IDE 程式碼的開發工具(安迪兒是用1.0.5)
http://arduino.cc/en/main/software
3.寫程式碼進Rapiro
這邊直接附上作者放出來的程式碼,安迪兒後來也改用作者放出來的版本~~XD
https://github.com/Ishiwatari/RAPIRO/tree/master/RAPIRO_ver0_0
打開Arduino IDE
定義每個馬達的初始化,然後upload code到Rapiro裡
調int trim[MAXSN] 那塊,
可以試寫調整Rapiro初始值為正常站立狀態

可以參考官網的設定
http://www.rapiro.com/serial-commands/
安迪兒的設定

目前程式碼有內定的一些動作了M0~M9,其實還有些特別的參數,不過這邊先不討論XD
save & upload完後,可以點Arduino IDE右上的放大鏡圖示Serial Monitor
裡面可以輸入一些自定好的動作了#M0~#M9
http://www.rapiro.com/serial-commands/
這邊有說每個指令的用途
順利的話,就可以看到Rapiro揮手嘍~小心別按到前進~會掉下桌面的~XD
裝好後照張相~~~超可愛的吶~~辛苦是值得的~~XD

實際影片:
之後安迪兒會再陸續和大家介紹(wii remote藍芽控制、無線網路控制、手機控制、影像監控...等等)
收工嘍~~~
